What is driving the need for changes in knee joint diagnosis and treatment?
The inspiration for developing this system primarily came from needs reported by doctors. While previously collaborating on medical robotics projects, I encountered a very specific issue related to knee diagnostics. It turned out that despite technological advances, there are still areas that rely mainly on the doctor’s experience and “feel.” That signalled to me that it might be possible to approach this problem from an engineering perspective and propose a more objective solution.
What specific problems is this system intended to solve?
Current diagnostics largely rely on manual examination, which is subjective and dependent on the doctor’s experience. There is a lack of repeatability and objective, numerical results. Additionally, further tests such as MRI or CT scans are often required. My system aims to provide precise, measurable data.
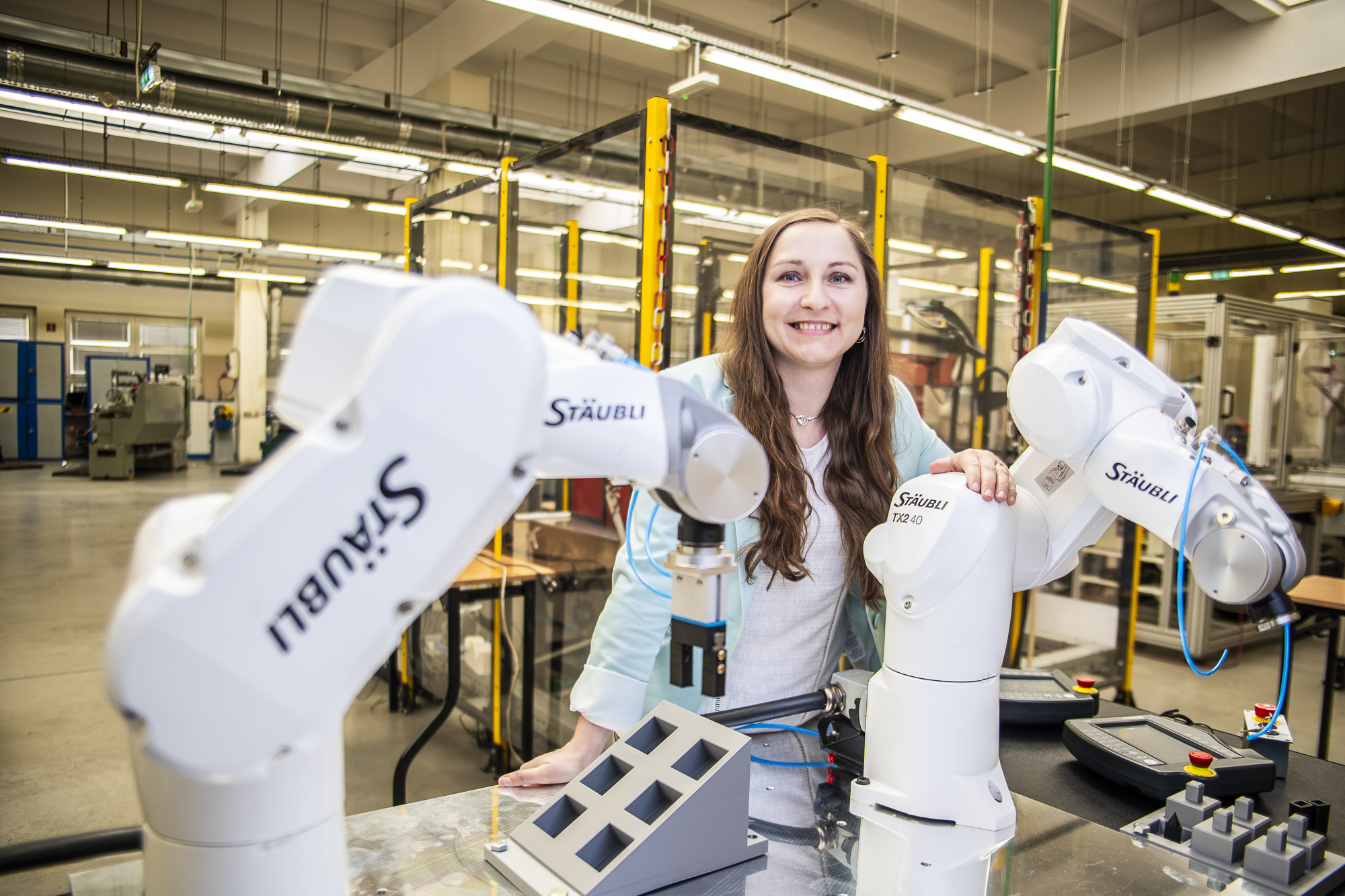
What technologies are being used?
The system is based on robotics—we use a collaborative robot or, alternatively, a Stewart platform (a parallel robot consisting of a fixed base and a movable upper platform). This is complemented by ultrasound sensors, which allow us to locate bone structures, and a vision system serving as a reference point. The whole setup is supported by data analysis that transforms results into a form understandable to doctors.
How advanced is the project?
Currently, the project is at the stage of developing and integrating individual components. We are conducting technical tests of the system and preparing for the next stages, such as studies on knee joint models and, in the future, cadavers (non-preserved anatomical specimens used for scientific and educational purposes).
Does the system analyze movement, internal knee structure, or both?
The system primarily analyzes movement in six degrees of freedom, but based on this, we can infer the condition of internal structures such as ligaments. So, we do not image them directly, as in MRI, but rather assess their function.
People have different body structures. How will the system handle anatomical variability among patients?
This is one of the key challenges. Soft tissues such as muscles or fat can interfere with measurements, which is why we use ultrasound sensors that allow us to refer directly to bone structures. This makes the system more independent of individual patient anatomy.
Who are you collaborating with on this research?
From the very beginning, I have worked closely with doctors, and their needs were the starting point for the project. The project also involves researchers and students from the Faculty of Mechanical Engineering.
How could this solution shorten diagnostic time or improve accuracy?
If reliable results can be obtained during the first examination, in many cases there will be no need to refer patients for additional, time-consuming imaging tests. This means faster diagnosis and earlier treatment. Moreover, thanks to objective measurements, we increase the precision of the entire diagnostic process.
Will this solution enable earlier detection of injuries in athletes?
The system will allow for very precise motion analysis and detection of deviations from the norm, so in the future it may also be used for earlier detection of injuries—for example, in athletes.
What functionalities would you like to add in future stages of development?
I would like to focus on improving how data is presented to doctors and further refining result interpretation so that it is as intuitive and useful as possible in clinical practice.
Do you see potential for using this system in diagnosing other joints?
For now, we are focusing on the knee joint, as it is both very complex and frequently injured. However, the underlying idea of the system—combining robotics with precise motion measurement—has the potential to be applied to other joints as well. This is definitely a direction worth considering in the future.
Interview by: Agnieszka Garcarek-Sikorska